



Autonomous Underwater Vehicle - I
An autonomous underwater vehicle -AUV is a robot that travels underwater without requiring any input from an operator. Autonomous underwater vehicles constitute part of a larger group of undersea systems known as unmanned underwater vehicles. However, a classification that includes non-autonomous remotely operated underwater vehicles -ROVs which are controlled and powered from the surface by an operator or a pilot via an umbilical or using remote control. Whereas In military applications an AUV is more often referred to as unmanned undersea vehicle -UUV. While the underwater gliders are a subclass of autonomous underwater vehicles.
History
The first autonomous underwater vehicle was developed at the Applied Physics Laboratory at the University of Washington in the early years of 1957 by Stan Murphy, Bob Francois and later on, Terry Ewart. While the special Purpose Underwater Research Vehicle, or SPURV, was used to study diffusion, acoustic transmission, and submarine wakes.
Other early AUVs were developed at the Massachusetts Institute of Technology in the 1970s. One of these is on display in the Hart Nautical Gallery in MIT. At the same time, AUVs were also developed in the Soviet Union; although this was not commonly known until much later.

Applications
Until relatively recently, the AUVs have been used for a limited number of tasks dictated by the technology available. With the development of more advanced processing capabilities and high yield power supplies, AUVs are now being used for more and more tasks with many roles and missions constantly developing.
Research & development
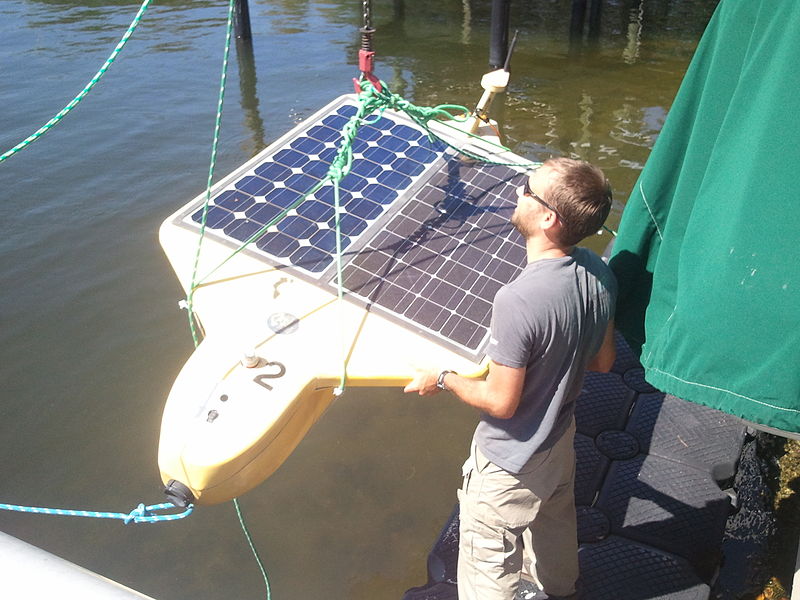
The University of South Florida researcher deploys Tavros02, a solar-powered "tweeting" AUV (SAUV). While the scientists use AUVs to study lakes, the ocean, and the ocean floor. A variety of sensors can be affixed to these advanced vehicles in order to measure the concentration of various elements or compounds, the absorption or reflection of light, and the presence of microscopic life. The examples include conductivity-temperature-depth sensors (CTDs), fluorometers, and pH sensors. Additionally, AUVs can be configured as tow-vehicles to deliver customized sensor packages to specific locations.
However, the oil and gas industry uses these vehicles to make detailed maps of the seafloor before they start building subsea infrastructure; pipelines and subsea completions can be installed in the most cost effective manner with minimum disruption to the environment. While the autonomous underwater vehicle allows survey companies to conduct precise surveys of areas where traditional bathymetric surveys would be less effective or too costly. Also, post-lay pipe surveys are now possible, which includes pipeline inspection. The use of AUVs for pipeline inspection and inspection of underwater man-made structures is becoming more common.
How they are used in the Military applications:
The U.S. Navy Unmanned Undersea Vehicle (UUV) Master Plan identified the following UUV's missions:
- Intelligence, surveillance, and reconnaissance
- Mine countermeasures
- Anti-submarine warfare
- Inspection/identification
- Oceanography
- Communication/navigation network nodes
- Payload delivery
- Information operations
The Navy Master Plan divided all UUVs into four classes:
- Man-portable vehicle class: 25–100 lb displacement; 10–20 hours endurance; launched from small water craft manually (i.e., Mk 18 Mod 1 Swordfish UUV)
- Lightweight vehicle class: up to 500 lb displacement, 20–40 hours endurance; launched from RHIB using launch/retriever system or by cranes from surface ships (i.e., Mk 18 Mod 2 Kingfish UUV)
- Heavyweight vehicle class: up to 3000 lb displacement, 40–80 hours endurance, launched from submarines
- Large vehicle class: up to 10 long tons displacement; launched from surface ships and submarines