



Fractal Robot Part 2
Movement Mechanism
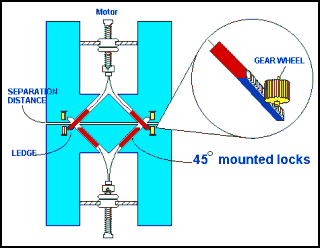
The petals are pushed in and out of the slots with the aid of a motor. Each petal could be directly driven by single motor or they could be driven as a pair with the aid of a flexible strip of metal.
These petals have serrated edges and they engage into the neighboring robotic cube through the 45 degree slots. While the serrated edges of the petals are engaged by either a gear wheel or a large screw thread running the length of the slot which slides the cubes along.
Implementation of computer control
All active robotic cubes have a limited microcontroller to perform basic operations such as the communication and control of internal mechanism. The commands to control a Fractal Robot are all commands for movement such as move left, right etc and hence the computer program to control the robot is greatly simplified in that whatever software that is developed for a large scale robot, it also applies to the smaller scale with no modifications to the command structure.
The largest component of the Fractal Robot system is the software. Because shape changing robots are fractals, everything around the robot such as tooling, operating system, software etc must be factually organized in order to take advantage of the fractal operation. Fractal Robot hardware is designed to integrate as seamlessly with software data structures as possible. So, it is essential that unifying Fractal architecture is followed to the letter for compatibility and interoperability. Fractal architecture dominates the functions of the core of the O.S, the data structures, the implementation of the devices etc. Everything that is available to the O.S is containerized into fractal data structures that permit possible compatibility and conversion issues possible.
Fractal O.S
The Fractal O. S plays a crucial role in making the integration of the system seamless and feasible. A Fractal O. S uses a no: of features to achieve these goals.
- Transparent data communication
- Data compression at all levels
- Awareness of built in self repair
A Fractal O. S coverts factually written code into machine commands for movement. The data signals are fed to a bus -fractal bus. The e3lectronics have to be kept simple so that they can be miniaturized. Towards this end, the Fractal Robot uses principally state logic. its internal design consists if ROM, RAM and some counters.
Fractal Bus
This is an important and pioneering advancement for fractal computer technology. A Fractal bus permits Hardware and software to merge seamlessly into one unified data structure. It helps in sending and receiving factually controlled data.
Computer software controls the shaping of objects that are synthesized by moving cubes around. To reduce the flow of instructions the message is broadcast to a local machine that controls a small no: of cubes typically around 100 cubes. All cubes communicate using a simple no: scheme. Each is identified in advance and then a no: is assigned. The first time around, the whole message and the no: is sent but the next time only the no: is sent.