



Ultrasonic Motor
Abstract
We all know that a motor is a machine that produces or imparts motion. In detail, it is a display of coils and magnets which converts electric energy into mechanical energy. The ultrasonic motors are going to be the next generation motors.
The world’s first ultrasonic motor was invented in the year 1980; this motor utilizes the piezoelectric effect in the ultrasonic frequency range to provide its motive force resulting in a motor with unusually good low speed, high torque and power to weight characteristics.
Electromagnetism has always been the driving force behind electric motor technology. However, these motors suffer from many drawbacks as the field of ultrasonic seems to be changing that driving force.
Introduction
It has been known for more than 30 years now, that the first ultrasonic motor was introduced by V.V Lavrinko in the year 1965. An ultrasonic motor is a type of electric motor produced from the ultrasonic vibration of a module; the stator will be placed against the rotor depending on the scheme of operation. It is an easy process to convert the electric energy into motion by the inverse piezoelectric effect.
To get hold of the levels of torque speed uniqueness of ultrasonic motor using conventional motors we need to add a gear system to reduce the speed. These unique characteristics of ultrasonic motor make it attractive for robotic applications; where low motions are required. The USM achieves high speed and drive forces permitting the moving parts to be positioned with high accuracy.
The Making
The making of an ultrasonic motor is simple than constructing electric type motors. You would need less assembled parts; which mean fewer moving parts and thus less wear are required to make an ultrasonic motor. You would need small components to construct a USM, thus, you can minimize the number of potential failure points.
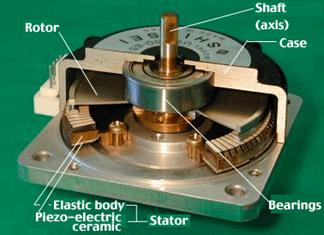
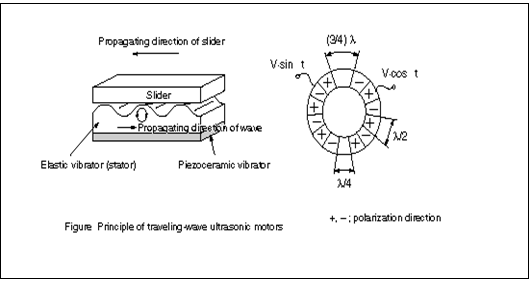
The driving force of an ultrasonic motor is its ultrasonic vibrations; a USM comprises a stator which is of a piezoceramic material with an elastic body attached to it, with a rotor to generate ultrasonic vibrations. A USM does not use magnets or coils. Thus, there is no problem of the magnetic field and interference as you see in the electric motors. The piezoelectric effect is used in USM and therefore, it generates little or no magnetic interference.
Principle of Operation – The Piezoelectric Effect
The piezoelectric effect is understood as the linear electromechanical interaction between the mechanical and the electrical state in crystalline materials with no inversion symmetry.
- Piezoelectricity - Generate voltage in the response to mechanical stress
- The word is derived from a Greek piezo, which means to squeeze or press
- This effect is also reversible
- Deformation in only 0.1% of the original dimension
- Piezoelectric material Quartz (SiO2), and Barium Titanate (BaTiO3) leads zirconate titanate and occasionally lithium niobate
Advantages of Piezoelectric Motor
- Electromagnetic motors consume high amount of power and create high ambient motor temperatures respect to Ultrasonic motors
- The electromagnetic motors produce high magnetic fields which cause interference. Whereas, Ultrasound motors use piezoelectric effect with no magnetic interference
- Electromagnetic motor has high input to output energy loss ratios
- Ultrasonic motor has high positional accuracy respect to electromagnetic motor
Conclusion
The design, development, and characterization of a piezoelectric ultrasonic motor have been investigated before the making and releasing it. The piezoelectric motor makes use of two orthogonal twisting modes of a void cylinder. The vibrating element, stator, of the motor, consists of a brass tube and two piezoelectric plates bonded to two compressed surfaces of the tube. There were three different motors that are fabricated in the first two designs; a solid stainless steel was used as a beam, a spring as a pre-stress and a ferrule to hold the rod and the spring. But, the major improvement of the 2nd motor was with respect to the 1st one, due to the reduction in the dimensions of the stator. The 3rd motor was the smallest in length among all and the shaft was replaced with a spring. Consequently, the efficiency and simplification of the proposed design were achieved after the alterations and experiments with all the three motors were characterized individually. Driving of the motor was enabled by switching power supply and the ultrasonic motor proved to be conventional and cheap.